
2022.08.19 현대자동차그룹

본격적인 전동화 시대에 발맞춰 차량을 제어하는 소프트웨어 기술도 큰 변화를 맞이하고 있다. 전동화 차량은 기존 내연기관 자동차와는 본질적으로 다른 파워트레인과 제어 구조를 가지는데, 이러한 배경에서 설립된 현대자동차그룹의 ‘전동화제어리서치랩’은 전동화 차량의 본질에 따라 새로운 기술을 창출하는 데에 그 존재 의의가 있다. 전동화 차량 제어 부문을 전방위적으로 고도화하기 위한 현대차그룹 전문 연구 조직, 전동화제어리서치랩의 구성원들을 만나 전동화 제어와 관련한 여러 이야기들을 들어봤다.
Q. 전동화제어리서치랩은 어떤 배경에서 창설되었나?
어정수 연구위원 | 전기차는 모터를 주 동력원, 혹은 보조 동력원으로 사용하고 있다. 따라서 기본적으로 차륜 구동 측면에서 내연기관 차량과 큰 차이가 있다. 동력원의 구조가 다르기 때문에 내연기관의 제어 방식과는 전혀 다른 제어 아키텍처를 구성할 수도 있다. 그래서 개발자 입장에서 보면 완전히 새로운 개념의 차량 제어를 시도해 볼 수 있는 기회가 있다고 할 수 있으며, 이러한 배경 속에 관련 연구에 집중할 수 있도록 전동화제어리서치랩을 만들었다. 조직 개설 초기에는 전동화 차량 관련 개발 비중이 높지 않아 인력/시설 규모가 크지 않았으나, 최근에는 전기차가 빠르게 시장에 보급되며 전동화 차량 제어 고도화에 대한 필요성이 더욱더 높아지는 추세다.
* 용어 해설
VGS(Virtual Gear Shift): 가상 변속 기능
IEB(Integrated Electronic Brake system): 전기차 제동 시스템 및 제어기
VDU(Virtual Drive Unit) 전기차 주행모드 시험 효율화 위한 자동 운전 장치
SMK(Smart Key system): 전기차 시동 On/Off 제어기
VCU(Vehicle Control Unit): 전기차 주행 전반과 운영을 총괄하는 제어기
Q. 전동화제어리서치랩은 주로 어떤 분야의 업무를 하고 있는가?
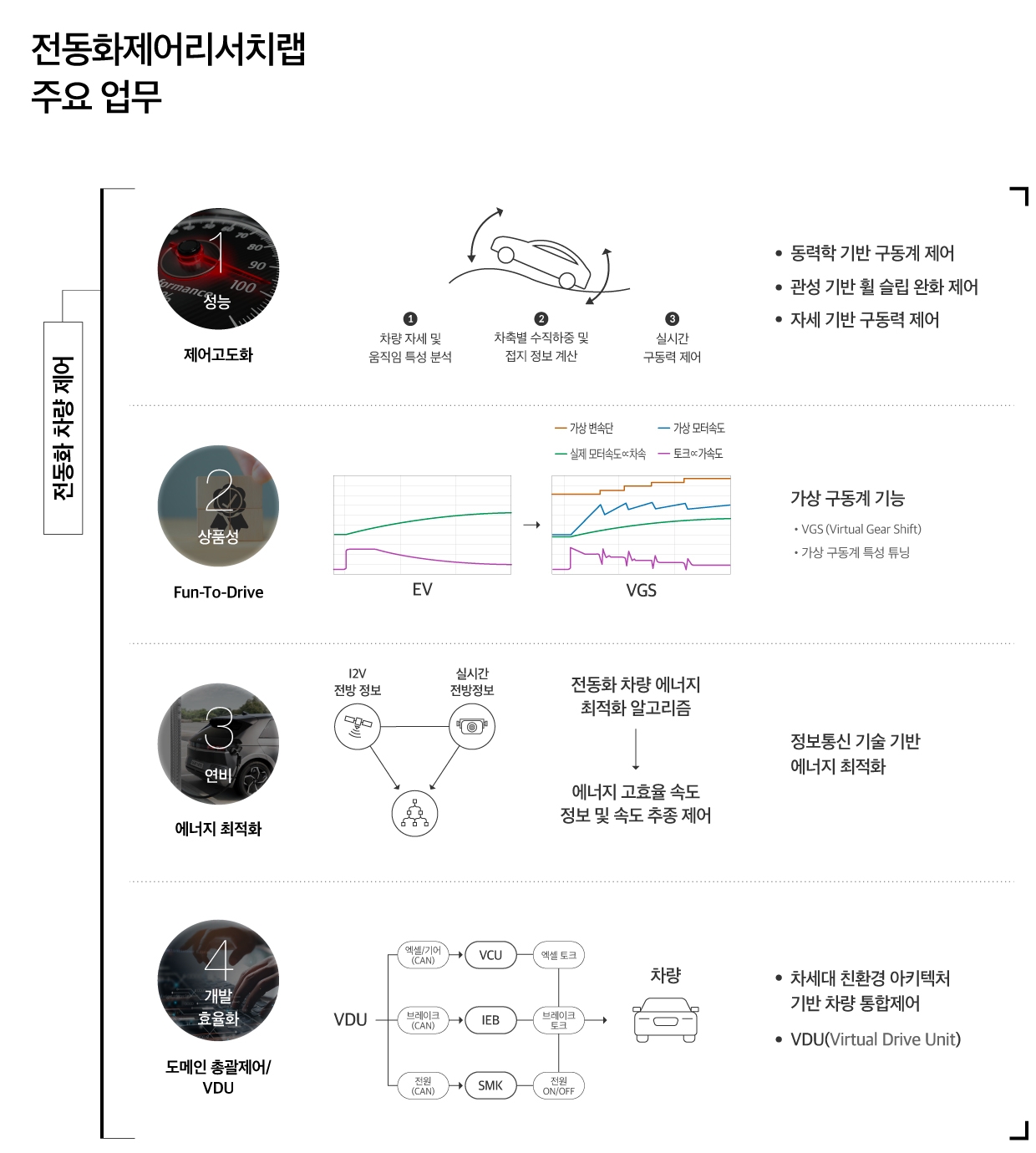
어정수 연구위원 | 크게 네 가지로 업무 영역을 정의할 수 있다.
① (제어 고도화) 기존에 경험을 기반으로 했던 차량 제어 개발 프로세스와 달리 동역학 모델을 활용해 차량의 운전성과 성능을 향상하는 아이템을 개발 중이다.
② (Fun-to-Drive) 전기차만의 특성을 강조해 현대차그룹의 상품성을 창출하는 것도 우리 업무다. 예컨대 전기차는 워낙 조용하고 부드러운 자동차라는 이미지가 있고, 실제로도 내연기관 차량만큼 제조사만의 운전 다양성을 내기도 힘들다. 그래서 현대차그룹 전기차만의 특색을 강조한 기술 개발을 위해 노력하고 있다.
③ (에너지 최적화) 전동화 차량의 에너지 효율을 최적화하는 것도 중요한 임무다. 전방 정보와 예측 기술을 활용해 회생 제동 에너지를 최대화하는 EDPS(Energy-optimal Deceleration Planning/following System) 기술을 개발*하고 있다.
* (논문 정보) D. Kim et al., "Service-Oriented Real-Time Energy-Optimal Regenerative Braking Strategy for Connected and Autonomous Electrified Vehicles," in IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 8, pp. 11098-11115, 2022
④ (도메인 총괄제어/VDU) 기존에는 협조 제어, 쉽게 말해 여러 제어 장치들이 하나의 작업을 수행하는 방식으로 전동화 차량의 제어 기능을 개선해왔다. 그러나 현재는 하나의 핵심 장치가 이 모든 요소를 통합 제어하는 시스템을 개발하고 있다. 이를 통해 아키텍처 구성이 기존과는 완전히 달라질 것으로 기대한다.

Q. 내연기관 차량의 제어 기술과 비교했을 때, 전동화 제어 기술의 가장 큰 차별점은 무엇인가?
이명원 책임연구원 | 전동화 제어 기술이 가진 가장 큰 차별점은 구동 모터의 존재 유무다. 내연기관의 주행 효율이 떨어지는 구간에서는 에너지 효율을 높일 수 있으며, 감속 시엔 구동 모터의 회생제동으로 주행 에너지를 회수하는 것도 가능하다. 또한 모터의 빠른 응답성을 활용함으로써 발진 제어와 진동을 줄여 주행 성능과 승차감을 향상할 수 있다는 장점이 있다.

Q. 전동화 차량 시대로 오면서 제어에 필요한 메커니즘적 특성이 크게 바뀌었을 것으로 예상한다. 실제로는 어떤가?
오지원 책임연구원 | 동력의 핵심이 내연기관에서 전기모터로 넘어오면서 많은 것이 변했다. 예컨대 엔진과 변속기는 합을 맞춰 효율적인 힘을 낸다. 그런데 전기 모터는 단독으로도 모든 구동 영역에서 높은 효율을 발휘하기 때문에 내연기관처럼 회전수와 같은 특정 영역을 고려해 제어할 필요가 없어졌다. 간단히 말해 내연기관 자동차의 시대에는 하드웨어 요소가 차량의 주요 특성을 주도했다면, 이제는 제어 기술로 대표되는 소프트웨어 제어가 차량의 많은 부분을 이끌고 있다.

Q. 전동화제어리서치랩의 기술 중 소비자들이 가장 쉽게 체감할 수 있는 기술이 있을까?
오지원 책임연구원 | 기존 차량에서 불편함을 느꼈던 부분을 제어 관점에서 개선한 사례가 있다. 하나의 예로, 내연기관 차량은 핵심 동력원에서 발생하던 여러 가지 충격을 변속기가 흡수해 부드러운 승차감을 냈다. 반면 전기차는 모터가 단독으로 동력을 발생하고 바퀴로 동력을 전달하는 과정에서 발생하는 충격(Back-lash 현상)이 상대적으로 더 크게 느껴지는 경우가 있다. 이를 방지하는 것이 충격 보상 제어 기술이다. 구동계에서 발생하는 충격량을 추정하는 제어 기술을 적용해 실시간으로 모터의 토크를 제어함으로써 승차감과 주행성을 개선한 바 있다.

김성재 책임연구원 | 현대차그룹의 전기차에 추후 탑재될 가상 변속(Virtual Gear Shift)이라는 기능도 소비자들이 체감할 수 있는 기술이다. 이 기능은 전기차에서 엔진의 가속감을 모사하는 가상 기술로, 속도계를 인위적으로 조절하고 클러스터에 기어 단수나 엔진 회전수를 표시한다. 또한 가상 엔진 사운드와 함께 실제 기어가 바뀔 때의 변속 충격처럼 모터를 제어한다. 결과적으로 기존 내연기관에 익숙한 운전자에게 전기차를 몰더라도 시각과 촉각, 그리고 청각 효과의 연동으로 내연기관 자동차를 타는 듯한 경험을 제공할 수 있다. 이 모든 것은 가상 요소를 통한 ‘연출’이기 때문에 변속기나 엔진의 종류, 변속 충격의 정도를 조절할 수 있는 커스터마이징 기술로 제공될 예정이다.
Q. 커넥티비티와 자율주행 기술을 어떻게 전동화 차량 제어 영역에 응용할 수 있을까?
김도희 책임연구원 | 커넥티비티는 크게 V2V(Vehicle to Vehicle, 차량 간 통신)와 I2V(Infrastructure to Vehicle, 인프라-차량 간 통신)로 나눌 수 있는데, V2V를 통해 주변 자동차들의 시야 정보를 상호 공유할 수 있으며 I2V로는 신호등 정보 등 전방 교통상황을 파악할 수 있는 데이터를 제공받을 수 있다. 또한, 자율주행 기술은 고도로 정밀한 센서를 많이 활용하고 있어 차량 주변의 주행 상황 정보를 정확하게 파악할 수 있는 데이터를 서로 교환할 수도 있다. 이렇게 커넥티비티 및 자율주행 기술을 전동화 차량 제어에 융합하면 신호 정보를 활용해 감속 상황을 미리 판단함으로써 회생 제동 시스템 효율을 극대화하는 것도 가능하다.
Q. 전동화제어리서치랩과 같은 연구개발본부 리서치랩 제도가 가진 장점은 무엇인가?
박진락 책임연구원 | 우리 같은 리서치랩 조직은 선행 개발을 위해 결성된 곳이다 보니, 자유로운 분위기 속에서 기술과 관련한 많은 시도를 해볼 수 있다. 이런 환경 속에서 팀원들이 성과를 내기 위해 스스로 아이디어를 내고, 능동적으로 연구를 하는 편이다. 또한 타 부서와의 협업이 자주 필요하기 때문에 다양한 분야의 지식을 배울 기회가 많다. 이렇다 보니, 자유로운 분위기에서 긍정적인 마음가짐으로 도전 정신을 갖고 연구하고 싶은 분들에겐 꼭 한번 리서치랩에서 일해보기를 추천한다.

Q. 전동화제어리서치랩의 리더로서, 리서치랩의 궁극적인 지향점과 목표는 무엇이라고 생각하는가?
어정수 연구위원 | 리서치랩의 존재 이유는 선행 개발이다. 그런데 우리가 개발한 기술을 어떤 방식으로 활용할 것인지에 대한 고민이 있다. 간단히 말하면 기술의 확장성을 고려해야 한다는 것이다. 궁극적으로는 자동차에 특화된 기술뿐만 아니라, 우리가 개발한 제어 기술을 기반으로 세상의 모든 탈것에 수평 전개하는 것이 궁극적인 지향점이라고 할 수 있다.

팀을 이끄는 어정수 연구위원뿐 아니라 전동화제어리서치랩의 모든 멤버는 미래 모빌리티 생태계의 중심이 될 전동화 차량을 다룬다는 자부심이 있었다. 이러한 자부심과 자신감을 토대로 머지않은 미래에 전동화제어리서치랩이 개발한 여러 결과물이 현대차그룹의 전동화 차량을 통해 고객들에게 새롭고 다채로운 신기술로 다가갈 전망이다. 또한 현재 13개 분야의 리서치랩을 운영하는 현대차그룹은 고객들에게 과거에는 경험할 수 없었던 가치를 전달하고자 끊임없이 노력할 것이다.
사진. 최진호